1 Convolution
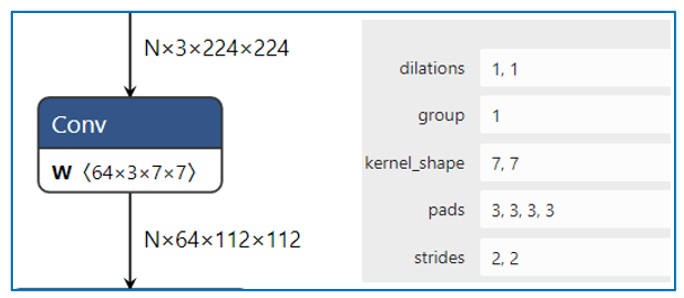
1.1 Conv2D
示意图
import torch
import torch.nn as nn
# With square kernels and equal stride
m = nn.Conv2d(16, 33, 3, stride=2)
# non-square kernels and unequal stride and with padding
m = nn.Conv2d(16, 33, (3, 5), stride=(2, 1), padding=(4, 2))
# non-square kernels and unequal stride and with padding and dilation
m = nn.Conv2d(16, 33, (3, 5), stride=(2, 1), padding=(4, 2), dilation=(3, 1))
input = torch.randn(20, 16, 50, 100)
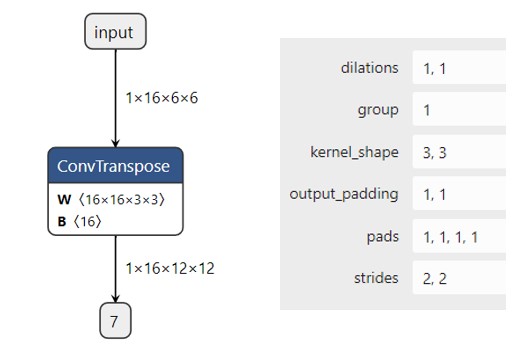
output = m(input)1.2 ConvTranspose2d
图示
import torch
import torch.nn as nn
# With square kernels and equal stride
m = nn.ConvTranspose2d(16, 33, 3, stride=2)
# non-square kernels and unequal stride and with padding
m = nn.ConvTranspose2d(16, 33, (3, 5), stride=(2, 1), padding=(4, 2))
input = torch.randn(20, 16, 50, 100)
output = m(input)
# exact output size can be also specified as an argument
input = torch.randn(1, 16, 12, 12)
downsample = nn.Conv2d(16, 16, 3, stride=2, padding=1)
upsample = nn.ConvTranspose2d(16, 16, 3, stride=2, padding=1)
h = downsample(input)
h.size()
output = upsample(h, output_size=input.size())
output.size()2 线性变换层
2.1 Linear/Gemm
图示 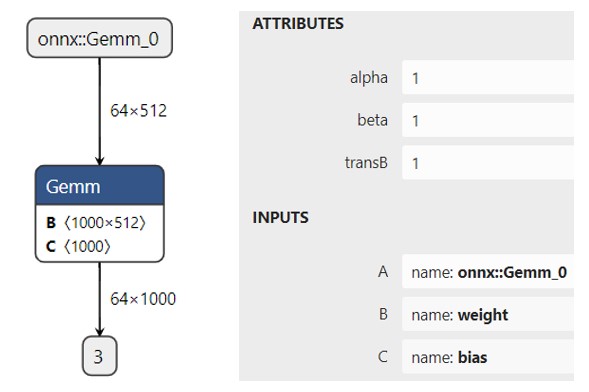
import torch
import torch.nn as nn
m = nn.Linear(20, 30) # A[m,k]*W[k,n] = O[m,n] --> 20 = k, 30 = n
input = torch.randn(128, 20)
output = m(input)
print(output.size())2.2 matmul 相关
图示 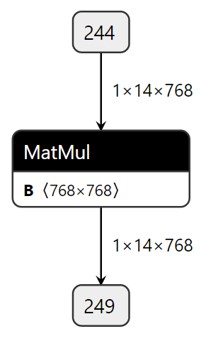
pytorch中有三个相似的矩阵操作
- matmul是通用的矩阵乘法函数,适用于不同维度的输入。
- bmm是用于批量矩阵乘法的函数,要求输入为3维张量。
- mm是用于两个二维矩阵乘法的函数,要求输入为2维张量。
import torch
tensor1 = torch.randn(10, 3, 4)
tensor2 = torch.randn(10, 4, 5)
torch.matmul(tensor1, tensor2).size()
mat1 = torch.randn(2, 3)
mat2 = torch.randn(3, 3)
torch.mm(mat1, mat2)
input = torch.randn(10, 3, 4)
mat2 = torch.randn(10, 4, 5)
res = torch.bmm(input, mat2)
res.size()3 Normalization
几种Normalization 对比 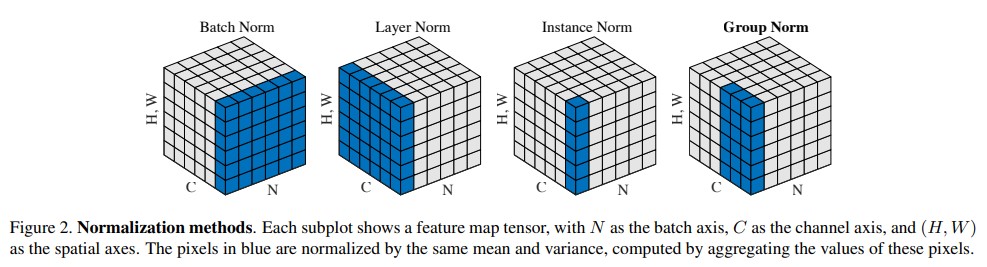
3.1 BatchNorm2d
BN示意图 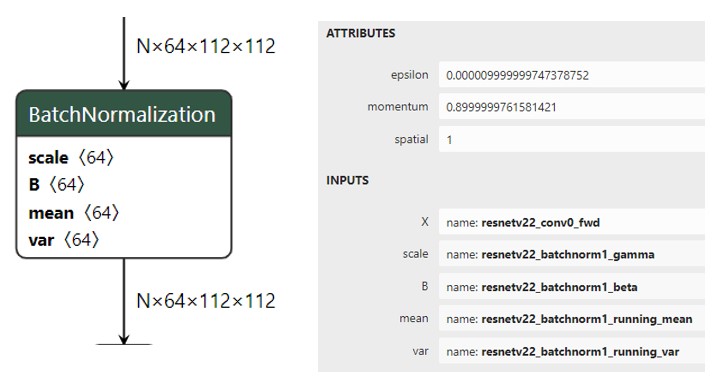
原理:
- batchNorm是在batch上,对NHW做归一化;即是将同一个batch中的所有样本的同一层特征图抽出来一起求mean和variance。
- 但是当batch size较小时(小于16时),效果会变差,这时使用group norm可能得到的效果会更好;
- 加入缩放和平移变量,改变数据分布的均值和方差;
作用:
- 首先,在进行训练之前,一般要对数据做归一化,使其分布一致,防止因输入数据分布变化对结果产生影响;
- 其次在网络中间,使用Batchnorm,将数据拉回到正态分布,加快收敛速度,防止梯度消失;
- 加入缩放和平移变量的原因是:保证每一次数据经过归一化后还保留原有学习来的特征,同时又能完成归一化操作,加速训练。 这两个参数是用来学习的参数。
思考:在训练和推理时有何不同???
# With Learnable Parameters
m = nn.BatchNorm2d(100)
# Without Learnable Parameters
m = nn.BatchNorm2d(100, affine=False)
input = torch.randn(20, 100, 35, 45)
output = m(input)手动实现
import numpy as np
def Batchnorm(x, gamma, beta, bn_param):
# x_shape:[B, C, H, W]
running_mean = bn_param['running_mean']
running_var = bn_param['running_var']
results = 0.
eps = 1e-5
x_mean = np.mean(x, axis=(0, 2, 3), keepdims=True)
x_var = np.var(x, axis=(0, 2, 3), keepdims=True0)
x_normalized = (x - x_mean) / np.sqrt(x_var + eps)
results = gamma * x_normalized + beta
# 因为在测试时是单个图片测试,这里保留训练时的均值和方差,用在后面测试时用
running_mean = momentum * running_mean + (1 - momentum) * x_mean
running_var = momentum * running_var + (1 - momentum) * x_var
bn_param['running_mean'] = running_mean
bn_param['running_var'] = running_var
return results, bn_param3.2 LayerNorm
LN 简述
- BN不适用于深度不固定的网络(如 RNN 中的sequence长度),而LayerNorm对深度网络的某一层的所有神经元进行标准化操作,非常适合用于序列化输入。
- LN一般只用于RNN的场景下,在CNN中LN规范化效果不如BN,GN,IN。
- LN 再NLP中对最后一个维度求均值和方差,需注意的是可训练的weight 和 bias shape 等于最后一个维度,即一个embedding 的index 对应一个权重和bias.
BN 和 LN 的区别
- LN中同层神经元输入拥有相同的均值和方差,不同的输入样本有不同的均值和方差;
- BN中则针对不同神经元输入计算均值和方差,同一个batch中的输入拥有相同的均值和方差。
- 所以,LN不依赖于batch的大小和输入sequence的深度,因此可以用于batchsize为1和RNN中对边长的输入sequence的normalize操作。
CV 和 NLP 中 LN的区别 
import torch
import torch.nn as nn
batch, sentence_length, embedding_dim = 20, 5, 10
embedding = torch.randn(batch, sentence_length, embedding_dim)
layer_norm = nn.LayerNorm(embedding_dim)
# Activate module
output = layer_norm(embedding)手动实现
def ln(x, b, s):
_eps = 1e-5
output = (x - x.mean(1)[:,None]) / tensor.sqrt((x.var(1)[:,None] + _eps))
output = s[None, :] * output + b[None,:]
return output
# 用于图像上
def Layernorm(x, gamma, beta):
# x_shape:[B, C, H, W]
results = 0.
eps = 1e-5
x_mean = np.mean(x, axis=(1, 2, 3), keepdims=True)
x_var = np.var(x, axis=(1, 2, 3), keepdims=True0)
x_normalized = (x - x_mean) / np.sqrt(x_var + eps)
results = gamma * x_normalized + beta
return results3.3 Instance Normalization
简述
BN注重对每个batch进行归一化,保证数据分布一致,因为判别模型中结果取决于数据整体分布。
但是图像风格化中,生成结果主要依赖于某个图像实例,所以对整个batch归一化不适合图像风格化中,因而对HW做归一化。可以加速模型收敛,并且保持每个图像实例之间的独立。
# Without Learnable Parameters
m = nn.InstanceNorm2d(100)
# With Learnable Parameters
m = nn.InstanceNorm2d(100, affine=True)
input = torch.randn(20, 100, 35, 45)
output = m(input)手动实现
def Instancenorm(x, gamma, beta):
# x_shape:[B, C, H, W]
results = 0.
eps = 1e-5
x_mean = np.mean(x, axis=(2, 3), keepdims=True)
x_var = np.var(x, axis=(2, 3), keepdims=True0)
x_normalized = (x - x_mean) / np.sqrt(x_var + eps)
results = gamma * x_normalized + beta
return results3.4 Group Normalization
原理
主要是针对Batch Normalization对小batchsize效果差,GN将channel方向分group,然后每个group内做归一化,算(C//G)HW的均值,这样与batchsize无关,不受其约束。
GroupNorm永远不再Batch维度上做平均
input = torch.randn(20, 6, 10, 10)
# Separate 6 channels into 3 groups
m = nn.GroupNorm(3, 6)
# Separate 6 channels into 6 groups (equivalent with InstanceNorm)
m = nn.GroupNorm(6, 6)
# Put all 6 channels into a single group (equivalent with LayerNorm)
m = nn.GroupNorm(1, 6)
# Activating the module
output = m(input)手动实现
def GroupNorm(x, gamma, beta, G=16):
# x_shape:[B, C, H, W]
results = 0.
eps = 1e-5
x = np.reshape(x, (x.shape[0], G, x.shape[1]/16, x.shape[2], x.shape[3]))
x_mean = np.mean(x, axis=(2, 3, 4), keepdims=True)
x_var = np.var(x, axis=(2, 3, 4), keepdims=True0)
x_normalized = (x - x_mean) / np.sqrt(x_var + eps)
results = gamma * x_normalized + beta
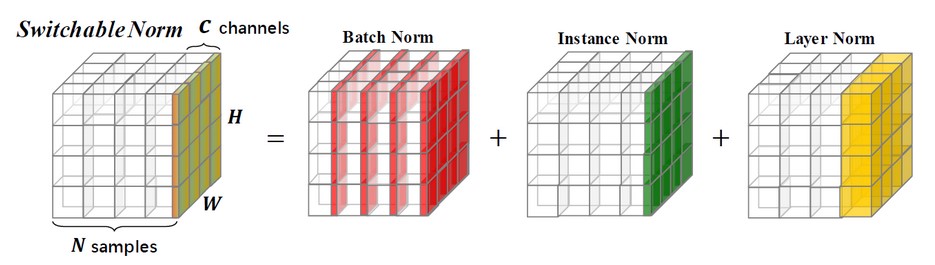
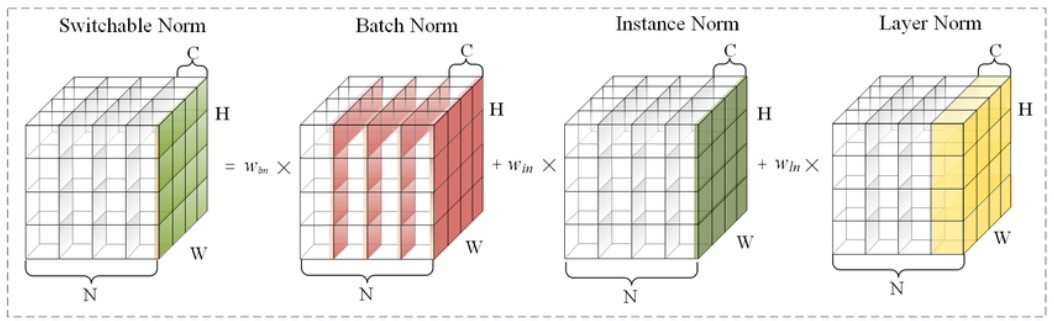
return results3.5 Switch norm
SN是一种覆盖特征图张量各个维度来计算统计信息的归一化方法,不依赖minibatch size的同时对各个维度统计有很好的鲁棒性.
3.6 RMS Norm
layer normalization 重要的两个部分是平移不变性和缩放不变性。Root Mean Square Layer Normalization 认为 layer normalization 取得成功重要的是缩放不变性,而不是平移不变性。因此,去除了计算过程中的平移,只保留了缩放,进行了简化,提出了RMS Norm (Root Mean Square Layer Normalization),即均方根 norm。
4 Pooling
Pooling(池化)是CNN 中常用的操作,通过在特定区域内对特征进行(reduce)来实现的。
作用
- 增大网络感受野
- 减小特征图尺寸,但保留重要的特征信息
- 抑制噪声,降低信息冗余
- 降低模型计算量,降低网络优化难度,防止网络过拟合
- 使模型对输入图像中的特征位置变化更加鲁棒
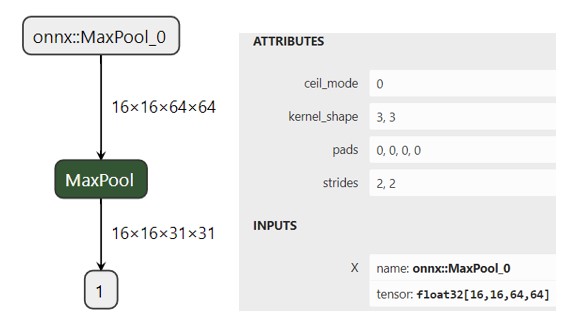
4.1 Max Pooling
原理
最大池化在每个池化窗口中选择最大的特征值作为输出,提取特征图中响应最强烈的部分进入下一层; 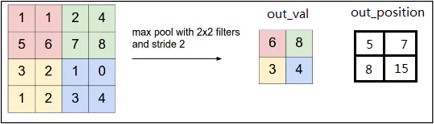
作用
这种方式摒弃了网络中大量的冗余信息,使得网络更容易被优化。同时这种操作方式也常常丢失了一些特征图中的细节信息,所以最大池化更多保留些图像的纹理信息。
import torch.nn as nn
# pool of square window of size=3, stride=2
m = nn.MaxPool2d(3, stride=2)
# pool of non-square window
m = nn.MaxPool2d((3, 2), stride=(2, 1))
input = torch.randn(20, 16, 50, 32)
output = m(input)4.2 AveragePooling
平均池化在每个池化窗口中选择特征值的平均值作为输出,这有助于保留整体特征信息,可以更多的保留图像的背景信息,但可能会丢失一些细节。
import torch.nn as nn
# pool of square window of size=3, stride=2
m = nn.AvgPool2d(3, stride=2)
# pool of non-square window
m = nn.AvgPool2d((3, 2), stride=(2, 1))
input = torch.randn(20, 16, 50, 32)
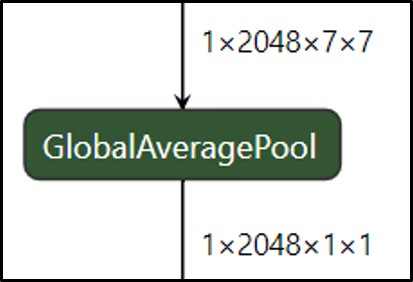
output = m(input)4.3 Global Average Pooling
背景
在卷积神经网络训练初期,卷积层通过池化层后一般要接多个全连接层进行降维,最后再Softmax分类,这种做法使得全连接层参数很多,降低了网络训练速度,且容易出现过拟合的情况。在这种背景下,M Lin等人提出使用全局平均池化Global Average Pooling[1]来取代最后的全连接层。用很小的计算代价实现了降维,更重要的是GAP极大减少了网络参数(CNN网络中全连接层占据了很大的参数)。
实现原理
全局平均池化是在整个特征图上计算特征值的平均值,然后将结果作为一个特征向量输出到下一层,这种池化方法通常在网络最后。
作用
作为全连接层的替代操作,GAP对整个网络在结构上做正则化防止过拟合,直接剔除了全连接层中黑箱的特征,直接赋予了每个channel实际的类别意义。除此之外,使用GAP代替全连接层,可以实现任意图像大小的输入,而GAP对整个特征图求平均值,也可以用来提取全局上下文信息,全局信息作为指导进一步增强网络性能。
import torch
import torch.nn as nn
# target output size of 5x7
m = nn.AdaptiveAvgPool2d((5, 7))
input = torch.randn(1, 64, 8, 9)
output = m(input)
# target output size of 7x7 (square)
m = nn.AdaptiveAvgPool2d(7)
input = torch.randn(1, 64, 10, 9)
output = m(input)
# target output size of 10x7
m = nn.AdaptiveAvgPool2d((None, 7))
input = torch.randn(1, 64, 10, 9)
output = m(input)5 activation functions
6 reshape、 view、 permute、transpose
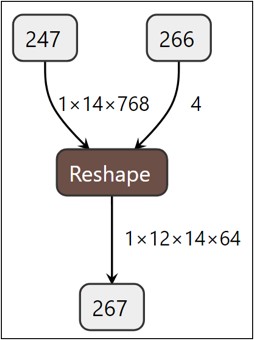
6.1 reshape
返回一个具有与输入相同的数据和元素数量,但具有指定形状的张量。如果可能的话,返回的张量将是输入的视图。否则,它将是一个副本。连续的输入和具有兼容步幅的输入可以进行重塑而无需复制,但您不应依赖于复制与视图行为。
a = torch.arange(4.)
torch.reshape(a, (2, 2))
b = torch.tensor([[0, 1], [2, 3]])
torch.reshape(b, (-1,))6.2 view
返回原始数据的不同shape。
x = torch.randn(4, 4)
x.size()
y = x.view(16)
y.size()
z = x.view(-1, 8) # the size -1 is inferred from other dimensions
z.size()
a = torch.randn(1, 2, 3, 4)
a.size()
b = a.transpose(1, 2) # Swaps 2nd and 3rd dimension
b.size()
c = a.view(1, 3, 2, 4) # Does not change tensor layout in memory
c.size()
torch.equal(b, c)6.3 transpose
交换Tensor的两个轴并返回。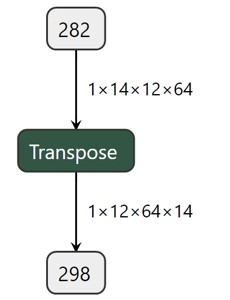
x = torch.randn(2, 3)
x
torch.transpose(x, 0, 1)6.4 permute
tensor 多轴交换。
x = torch.randn(2, 3, 5)
x.size()
torch.permute(x, (2, 0, 1)).size()7 sequenze 和 unequenze
压缩维度与解压维度。
图像 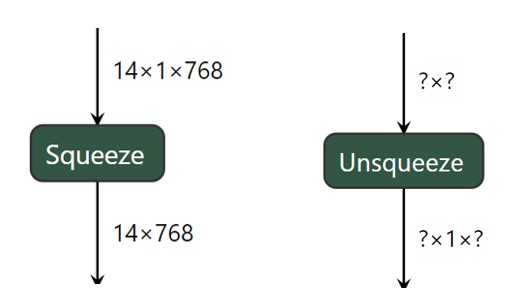
8 concat、stack、expand 和 flatten
8.1 concat
在给定的维度上拼接给定的序列张量。所有张量必须具有相同的形状(除了拼接维度),或者为空。是split 的逆运算,是torch.cat的别名。
x = torch.randn(2, 3)
torch.cat((x, x, x), 0)
torch.cat((x, x, x), 1)8.2 stack
在新轴上拼接Tensor。
a = torch.randn(2,3)
b = torch.randn(2,3)
c= torch.stack([a,b], dim=1)8.3 expand
返回一个self张量的新视图,其中的单例维度被扩展到更大的大小。
x = torch.tensor([[1], [2], [3]])
x.size()
x.expand(3, 4)
x.expand(-1, 4) # -1 means not changing the size of that dimension思考:expand 后的形状可以随便写吗?需要满足什么规则 ???
8.4 flatten
通过将输入张量重塑为一维张量来对其进行扁平化。如果传递了start_dim或end_dim,则只有以start_dim开头且以end_dim结尾的维度被扁平化。输入中元素的顺序保持不变。
t = torch.tensor([[[1, 2],
[3, 4]],
[[5, 6],
[7, 8]]])
torch.flatten(t)
torch.flatten(t, start_dim=1)9 pointwise
Tensor 中逐元素进行的操作,也叫element wise 操作,大部分的activation 算子以及 add、sub、mul、div、sqrt 等都属于pointwise 类别。
a = torch.randn(4)
torch.sqrt(a)思考:不同维度的两个Tensor 可以进行pointwise 操作吗? 能的话规则是什么样的???
10 split 和 slice
10.1 split
将张量分割成多个块。每个块都是原始张量的视图。
a = torch.arange(10).reshape(5, 2)
torch.split(a, 2)
torch.split(a, [1, 4])思考:是沿着那个轴进行split 呢??
10.2 slice
直接用索引来实现
import torch
# 创建一个示例张量
tensor = torch.tensor([1, 2, 3, 4, 5, 6, 7, 8, 9, 10])
# 对张量进行切片
slice_tensor = tensor[2:7] # 从索引2到索引6(不包含7)
print(slice_tensor) # 输出: tensor([3, 4, 5, 6, 7])
# 使用步长对张量进行切片
step_slice_tensor = tensor[1:9:2] # 从索引1到索引8(不包含9),步长为2
print(step_slice_tensor) # 输出: tensor([2, 4, 6, 8])
# 省略起始索引和结束索引来选择整个张量
full_tensor = tensor[:]
print(full_tensor) # 输出: tensor([1, 2, 3, 4, 5, 6, 7, 8, 9, 10])11 reduce 规约类算子
mean
a = torch.randn(4, 4)
torch.mean(a, 1)
torch.mean(a, 1, True)var
a = torch.tensor(
[[ 0.2035, 1.2959, 1.8101, -0.4644],
[ 1.5027, -0.3270, 0.5905, 0.6538],
[-1.5745, 1.3330, -0.5596, -0.6548],
[ 0.1264, -0.5080, 1.6420, 0.1992]])
torch.var(a, dim=1, keepdim=True)sum
a = torch.randn(4, 4)
torch.sum(a, 1)
b = torch.arange(4 * 5 * 6).view(4, 5, 6)
torch.sum(b, (2, 1))max
a = torch.randn(4, 4)
torch.max(a, 1)min
a = torch.randn(4, 4)
torch.min(a, 1)12 embedding
这个模块经常被用来存储单词嵌入,并使用索引来检索它们。该模块的输入是一个索引列表,输出是相应的单词嵌入。
# an Embedding module containing 10 tensors of size 3
embedding = nn.Embedding(10, 3)
# a batch of 2 samples of 4 indices each
input = torch.LongTensor([[1, 2, 4, 5], [4, 3, 2, 9]])
embedding(input)
# example with padding_idx
embedding = nn.Embedding(10, 3, padding_idx=0)
input = torch.LongTensor([[0, 2, 0, 5]])
embedding(input)
# example of changing `pad` vector
padding_idx = 0
embedding = nn.Embedding(3, 3, padding_idx=padding_idx)
embedding.weight
with torch.no_grad():
embedding.weight[padding_idx] = torch.ones(3)
embedding.weight
# FloatTensor containing pretrained weights
weight = torch.FloatTensor([[1, 2.3, 3], [4, 5.1, 6.3]])
embedding = nn.Embedding.from_pretrained(weight)
# Get embeddings for index 1
input = torch.LongTensor([1])
embedding(input)13 dropout
在训练过程中,使用从伯努利分布中采样的样本,以概率p随机将输入张量的某些元素置零。每个通道在每次前向调用时都会独立地被置零。
原理图 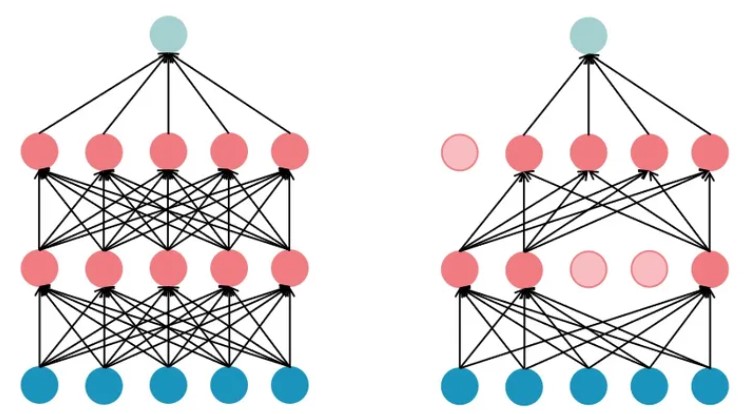
m = nn.Dropout(p=0.2)
input = torch.randn(20, 16)
output = m(input)思考:训练和推理时这个算子表现有何不同 ???*