回顾和复习整理DL
00. python基础(未补)
抽空补充
迭代器
装饰器
场景 装饰器功能 示例 训练时间统计 记录函数运行时间 @timer梯度裁剪 防止梯度爆炸 @gradient_clip(max_norm=1.0)模型验证模式 自动切换 eval()和train()@eval_mode日志记录 保存训练指标到文件 @log_metrics(log_file="...")数据预处理 自动标准化/增强输入数据 @normalize_data(mean, std)callable
00. 数学补充(未完全推导)
概率、几率、条件概率、联合概率等
:事情A发生的“可能性”是多少。
:成功的机会与失败的机会的“比值”(或者对应概率的比值)
P(A∣B):在已知B发生的前提下,A发生的概率。
P(A∩B):A和B同时发生的概率。
根据上面内容引出sigmoid和softmax
熵、交叉熵、联合熵等
:一个分布有多“不可预测”?简单说就是一事件的不确定程度。熵越大,说明越“混乱”,越不确定。
:用另一个分布 去预测真实分布 时,我们“犯了多大错”。
联合熵:两个变量一起的“不确定性”。
KL距离和KL散度
KL散度衡量“两个概率分布差了多少”。
极大似然估计
极大似然估计是一种“反推”模型参数的办法,它认为你观察到的数据就是最有可能的现实,然后去找那个最可能解释现实的参数。(有点类似最小二乘)
- 1.似然函数:在某个特定参数下,我们观测到的数据有多“可能”出现。
- 2.取对数
- 3.对2作为目标函数,求极大值(或者负对数的极小值)
- 4.参数解析式的求法:a.直接求解(有对数,不方便),b.采用梯度下降思想
- 5.参数确定后,上游任务确定
01. Activation🌟🌟🌟
1. 我的记录:
为啥需要Activation?(深度学习往往只说非线性Attention)
都是Linear(或者Covn)的话网络还是线性的,多层和一层没啥太大区别。
有哪些类型?(工程上主要类别)
一种是point wise的操作(或者叫做element wise操作),也就是逐元素操作;另一种是具有相关性操作
Note: 公式、图像、导数图像、优缺点……
A类:数据间独立
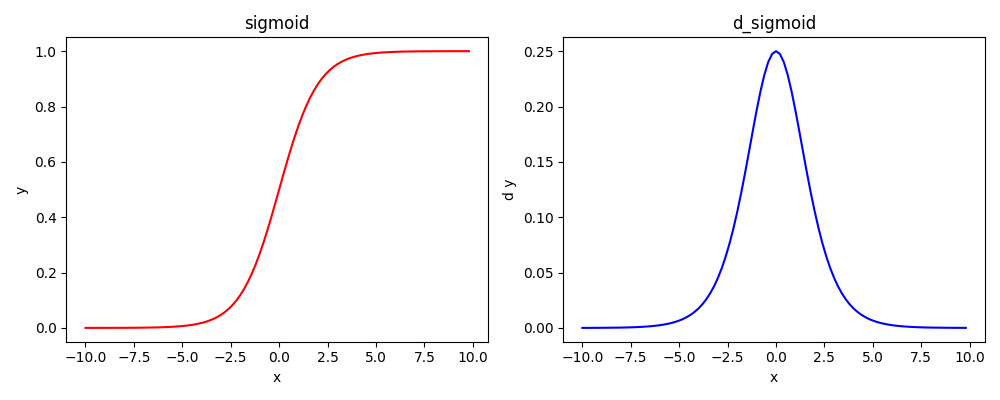
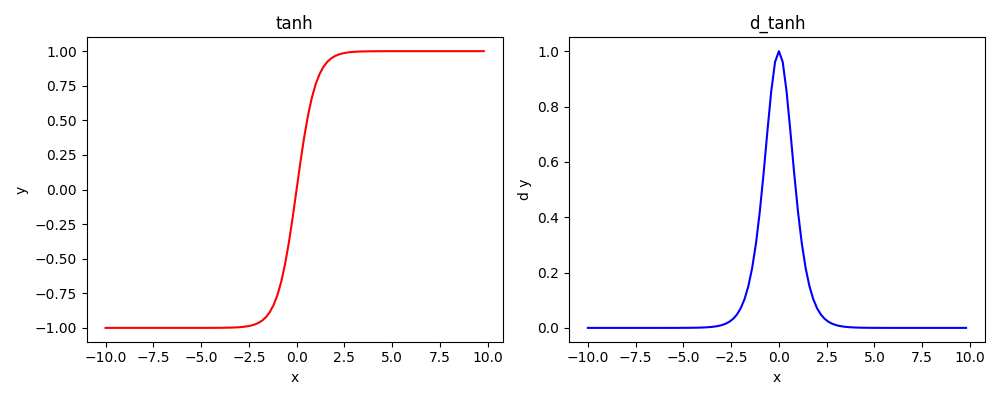
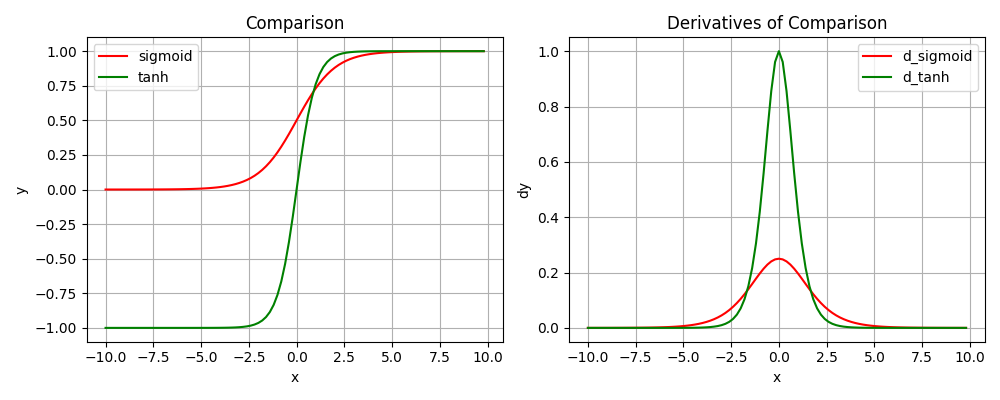
S型:
sigmoid(0.5的二分类问题)
梯度链式法则累乘会趋近于0,两层的最值也就是0.25,多层可想而知
Tanh(NLP的递归系列常用)
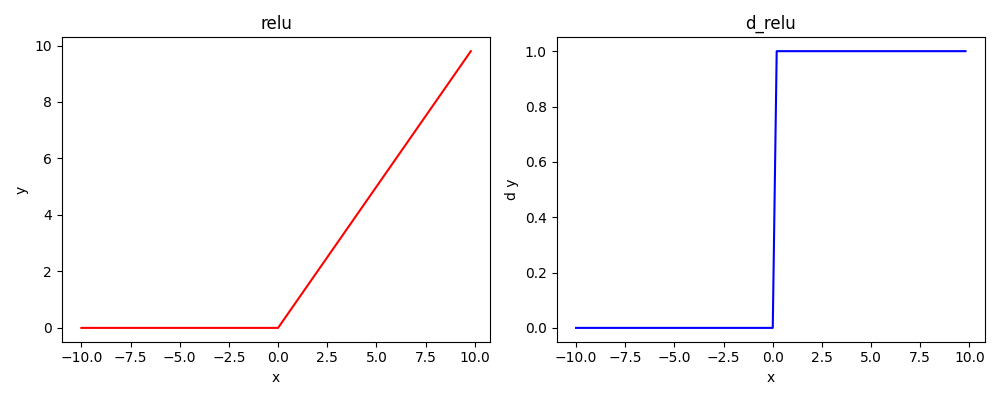
==ReLU==:AlexNet里面提出。
ReLU
但是神经元或者链路太少,会有0的导数,更新不易
缓解激活值指数性增长=>ReLU6
缓解神经元坏死现象=>Leakey ReLU=>PReLU/RReLU
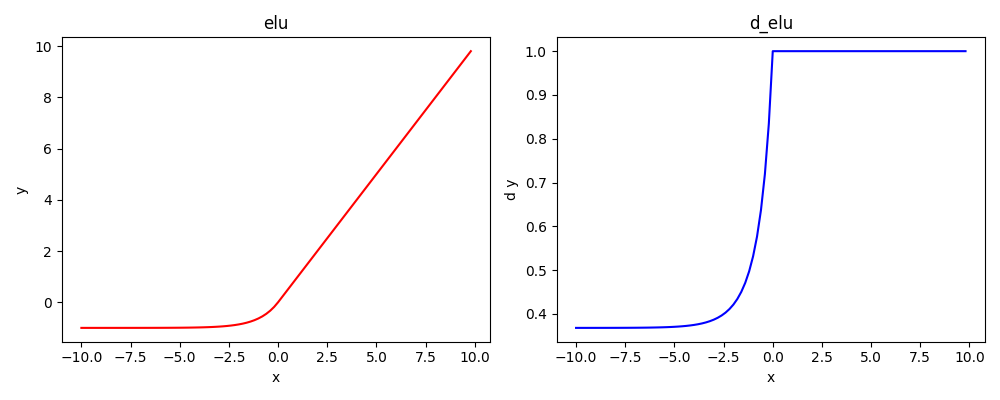
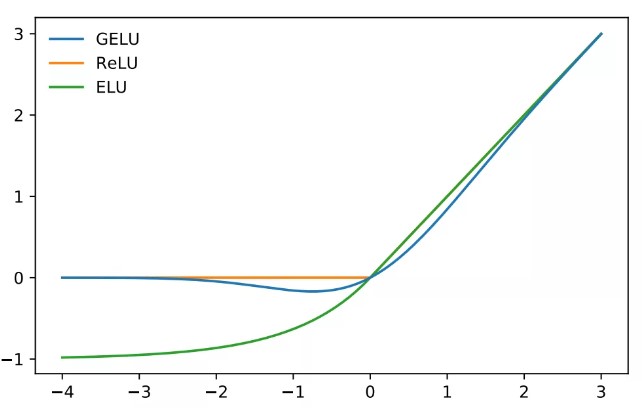
x=0处平滑过渡=>ELU/SELU
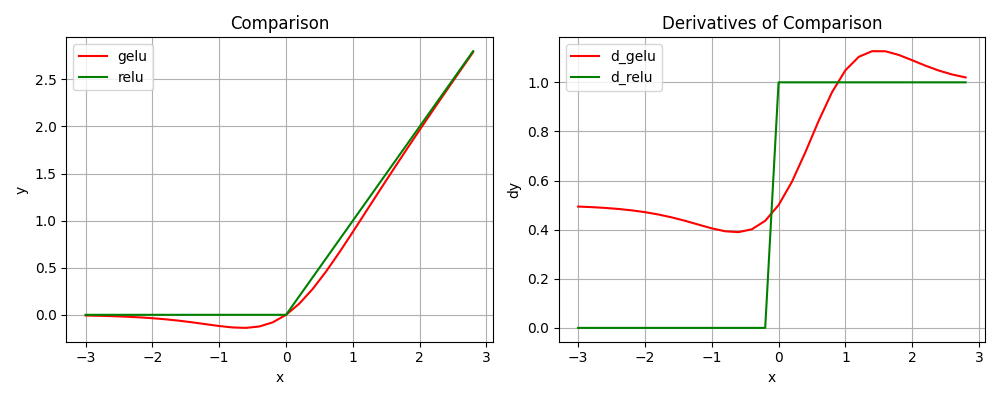
==GeLU==(工程上有点简化,现在大模型都会用他的变种)
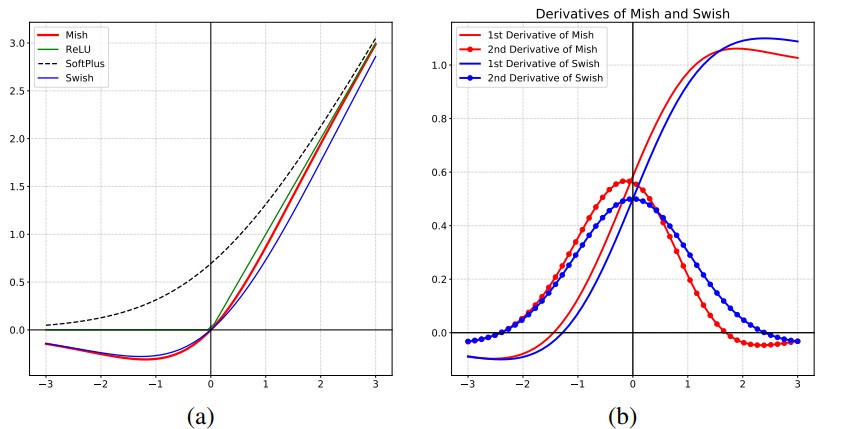
Swish:
- Switch(对sigmoid进行修改)
- Hard Swish(对ReLU6做修改,计算更简单)。“凑图像”
mish:平滑性更高(看一阶和二阶导图像)
B类:数据间有相互作用
==softmax==;想想sigmoid。这个是多分类,单调非负归一
类似操作还有矩阵乘法等
\frac{d(sigmoid)}{dx} = sigmoid(x) · (1 - sigmoid(x))
GELU(x)=xP(X≤x)\\ \ \ \ \ \ \ \ \ =xΦ(x) xΦ(x)≈xσ(1.702x) xΦ(x)≈\frac{1}{2} ×[1+tanh(\sqrt{\frac{π}{2}}(x+0.044715x^3))]超参数a=1时

源码里面有所优化:
💡 实际意义:
- Softmax 的导数不是独立的,每个输出值的梯度都跟其它的有关。
2. 简单总结(未优化):
| 激活函数 | 数学表达式 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|---|
| Sigmoid | 输出在 (0,1),适合概率输出 | 梯度消失、非零均值、计算较慢 | 二分类输出层 | |
| Softmax | 多分类概率分布,输出总和为 1 | 对极端值敏感,计算成本高 | 多分类输出层 | |
| Tanh | 输出在 (-1,1),零均值 | 梯度消失问题 | RNN、数据对称场景 | |
| ReLU | 计算高效,缓解梯度消失 | 神经元死亡(负值输出为 0) | CNN、默认隐藏层激活 | |
| Leaky ReLU | 缓解神经元死亡问题 | 需手动调参(如 α=0.01) | 深层网络替代 ReLU | |
| PReLU | Leaky ReLU,但α可学习 | 自适应斜率,更灵活 | 增加参数量 | 复杂任务、深层网络 |
| ELU | 平滑负值,缓解梯度消失 | 计算复杂(含指数运算) | 需要处理负值的场景 | |
| GELU | Φ 为标准正态 CDF | 平滑柔和,适合深度网络 | 计算复杂 | Transformer、BERT 等模型 |
| Swish | (β可调) | 非单调,实验性能优于 ReLU | 计算较复杂 | EfficientNet 等先进网络 |
| Mish | 平滑、无上界,缓解梯度消失 | 计算成本高 | 计算机视觉任务 | |
| Step | 二元输出 | 不可微,无法用于梯度下降 | 早期感知机(现已少用) |
3. 我的思考:
- 对于类似softmax这种同一条数据的分母相同的,每次是否需要重新计算分母?(底层是否会做cache?)
- PyTorch源码里面的
Softmax激活提及了NLLLoss,这是什么?与交叉熵又是什么关系? - softmax的导数推导。
- softmax输入的shape和梯度的shape不一样大吗?参数更新的时候又是怎样子的?
02. 常用Torch算子
torch.nn
- Containers
- Convolution Layers
- Pooling layers
- Padding Layers
- Non-linear Activations (weighted sum, nonlinearity)
- Non-linear Activations (other)
- Normalization Layers
- Recurrent Layers
- Transformer Layers
- Linear Layers
- Dropout Layers
- Sparse Layers
- Distance Functions
- Loss Functions
- Vision Layers
- Shuffle Layers
- DataParallel Layers (multi-GPU, distributed)
- Utilities
- Quantized Functions
- Lazy Modules Initialization
1. Convolution(未补)
2. 线性变换层
Linear/Gemm
Note: Linear的weight是转置存放的
pythonself.weight = Parameter( torch.empty((out_features, in_features), **factory_kwargs) )Matmul
type与Linear的不同
要满足广播机制
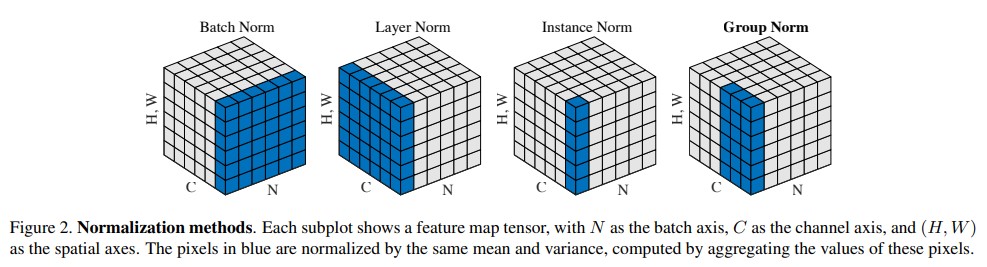
3. Normlization🌟🌟🌟🌟
- 类型Batch Norm,Layer Norm,Instance Norm,Group Norm,RMS Norm
公式
功能
去量纲,把数据调整到更强烈的数据分布
减少梯度消失和梯度爆炸
主要是有一个计算期望和方差的过程
做Norm的粒度不同,应用场景不同
其他资料:Batch Norm的技术博客
特征和不同
- 粒度不同(维度不同),对应应用领域不同
Batch Norm是逐channel(每个batch的同一个channel)进行标准化,也就是垮batch的。图片恰好需要这种方式。
LN是逐batch进行标准化的。NLP中往往是一个一个的seq进行训练的,而且长度不同,更适合这种。这让我想起了Attention的soft max操作是对一个行向量进行归一化的
LayerNorm有助于稳定训练过程并提高收敛性。它的工作原理是对输入的各个特征进行归一化,确保激活的均值和方差一致。**普遍认为这种归一化有助于缓解与内部协变量偏移相关的问题,使模型能够更有效地学习并降低对初始权重的敏感性。**从架构图上看,LayerNorm在每个Transformer 块中应用两次,一次在自注意力机制之后,一次在FFN层之后,但是在实际工作中不一定如此。
文本长度不确定,而在LN层可以。
应用场景确定LN
BN期望和方差计算策略
训练时:一个batch内计算
推理时:
采用移动指数平均,不依赖于batch。会有历史信息在,有点类似RNN了Var 同理
阶段 使用的统计量 是否更新 running_mean/var 是否依赖 batch 数据 训练 当前 batch 的 μ, σ² ✅ 更新 ✅ 依赖 推理 训练累积的 running_mean/var ❌ 不更新 ❌ 不依赖 在训练和推理时有何不同?
pytorch的模型有两种模式,在module模块里面有个
training属性,也有对应的API,里面明确指出了这个在BatchNorm采用训练时计算的结果(E和Var),应用到测试或者推理的时候
在Dropout后续会说,训练会drop掉,但推理不会,会改成(1-rate)
pythondef train(self: T, mode: bool = True) -> T: r"""Set the module in training mode. This has any effect only on certain modules. See documentations of particular modules for details of their behaviors in training/evaluation mode, if they are affected, e.g. :class:`Dropout`, :class:`BatchNorm`, etc. Args: mode (bool): whether to set training mode (``True``) or evaluation mode (``False``). Default: ``True``.官方文档说明:
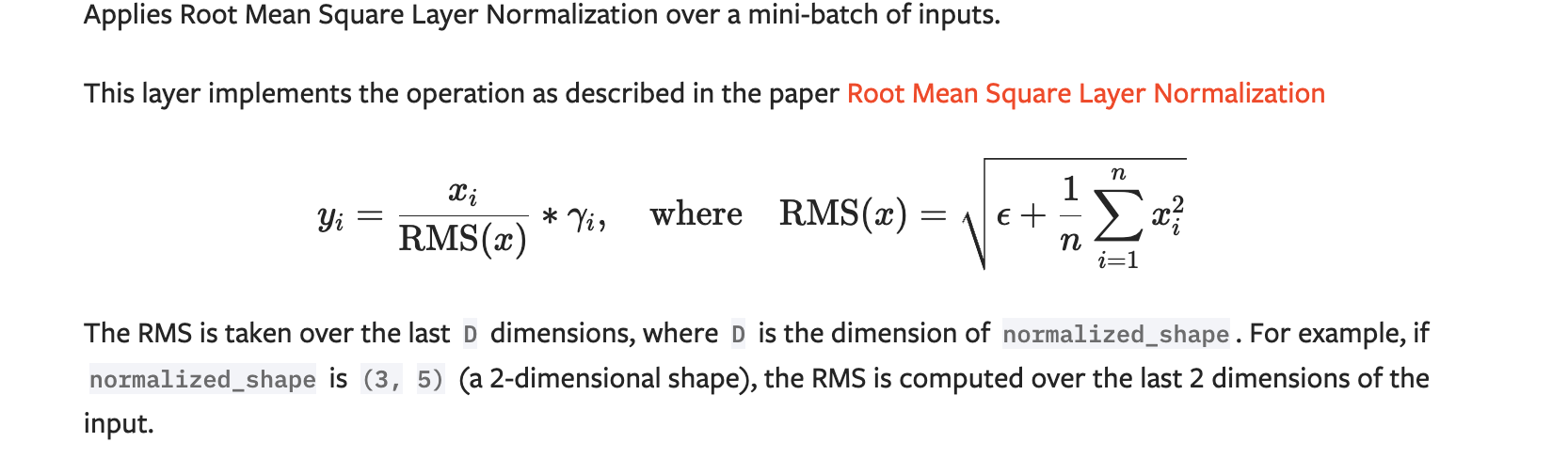
RMS Norm(大模型使用)🌟🌟🌟
来源于LN,简化了LN
减均值相当于平移,这里直接去掉平移,只保留缩放
把乘法直接放进来了,
对LN做简化,对于NLP,对缩放敏感,对平移不敏感,所以分子不减,减少了很大计算量
补充部分:
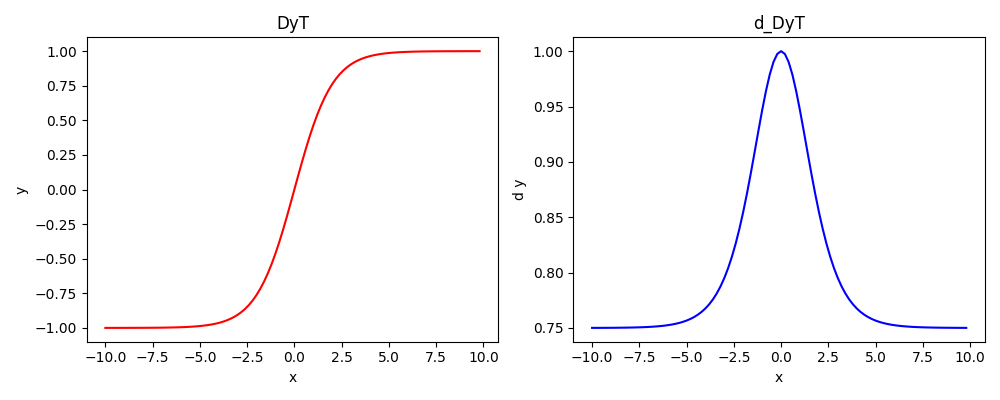
DyT(Transformers without normlization)
Transformers without normlization
Pre-Norm(大模型使用)和Post-Norm
Output_{post}=LayerNorm(x+SubLayer(x)) \\ Output_{pre}=x+SubLayer(LayerNorm(x))结合Transformer那块知识,一个是在残差前,一个在残差后
| 特性 | Post-Norm | Pre-Norm |
|---|---|---|
| 公式 | 公式1 | 公式2 |
| 位置 | 残差后 | 残差前 |
| 出现时间 | 原始 Transformer(Vaswani et al., 2017) | 之后发展(如 GPT-2 等) |
| 优点 | 收敛后表现略好(某些任务) | 更稳定,训练深层模型不易梯度消失 |
| 缺点 | 深层模型中容易梯度消失/爆炸 | 可能最终性能略低,但更容易训练 |
| 应用情况 | BERT、初版Transformer | GPT系列、T5、LLama等大模型 |
| 模型 | 归一化类型 |
|---|---|
| DeepSeek | Pre-Norm |
| GPT-2/3/4 | Pre-Norm |
| BERT | Post-Norm |
| T5 | Pre-Norm |
| LLaMA | Pre-Norm |
| Transformer XL | Pre-Norm |
| 原始 Transformer | Post-Norm |
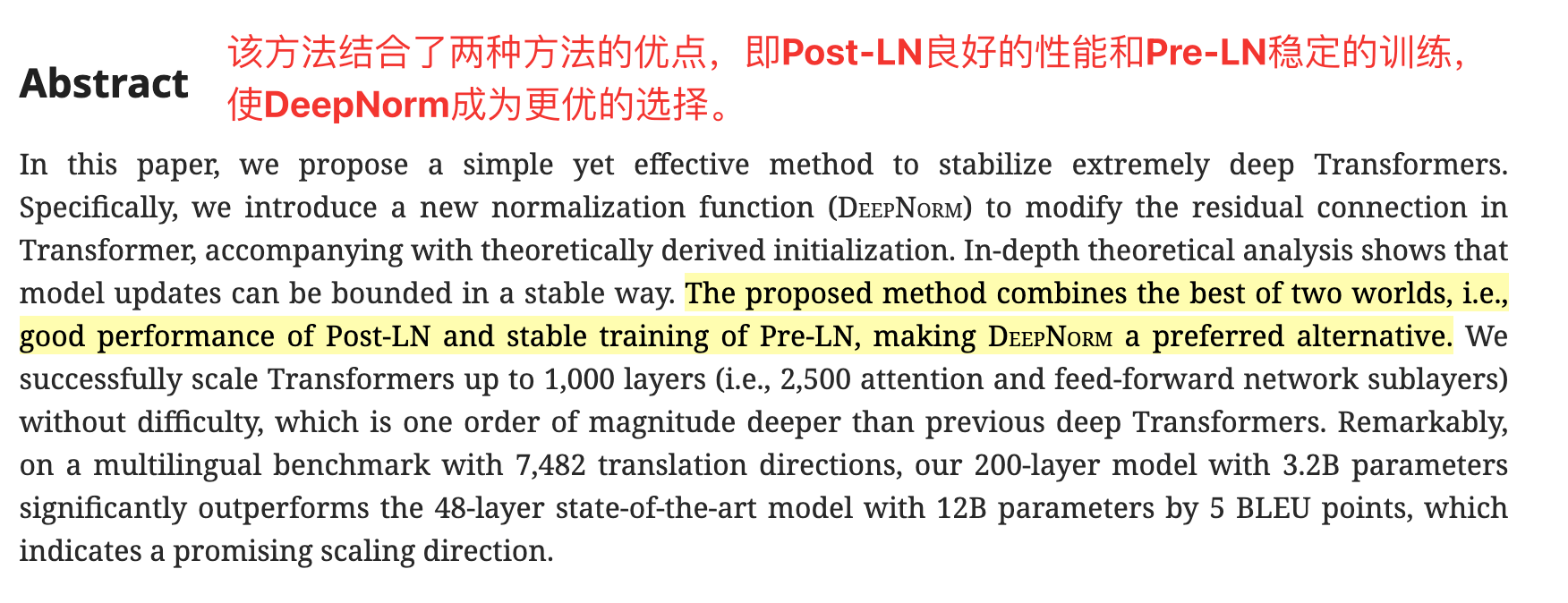
DeepNorm
DeepNorm 是微软在 2022 年提出的改进方法(论文 "DeepNet: Scaling Transformers to 1,000 Layers"),基于 Post-Norm 但大幅提升了深层训练的稳定性,可支持超深层(如 1000 层)Transformer 的训练。
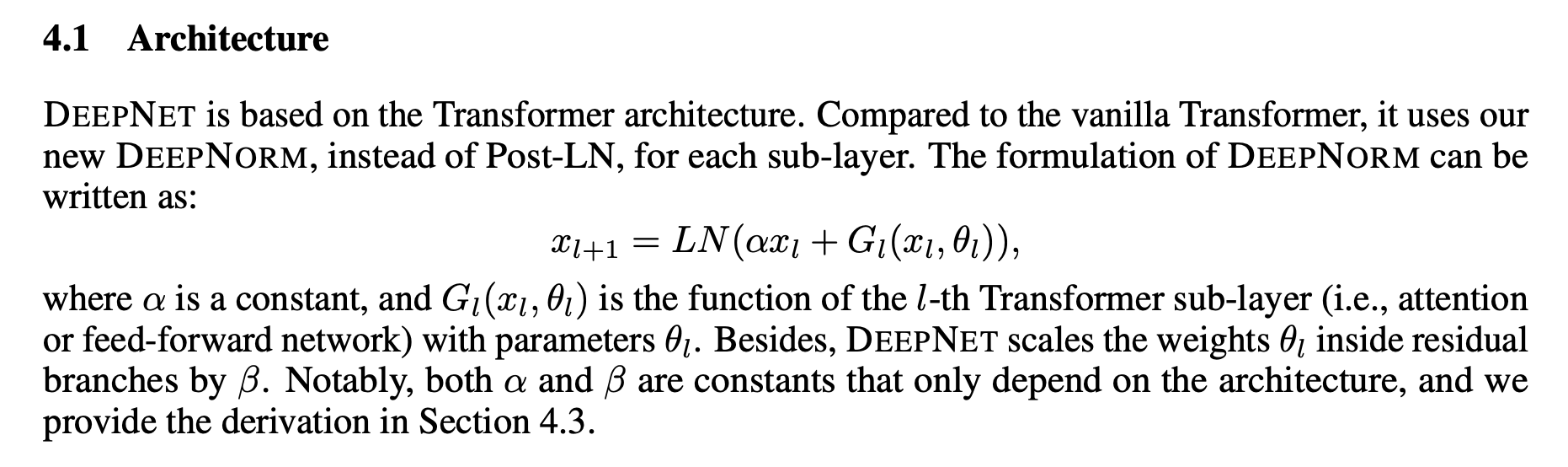
原始残差结构:
DeepNorm:
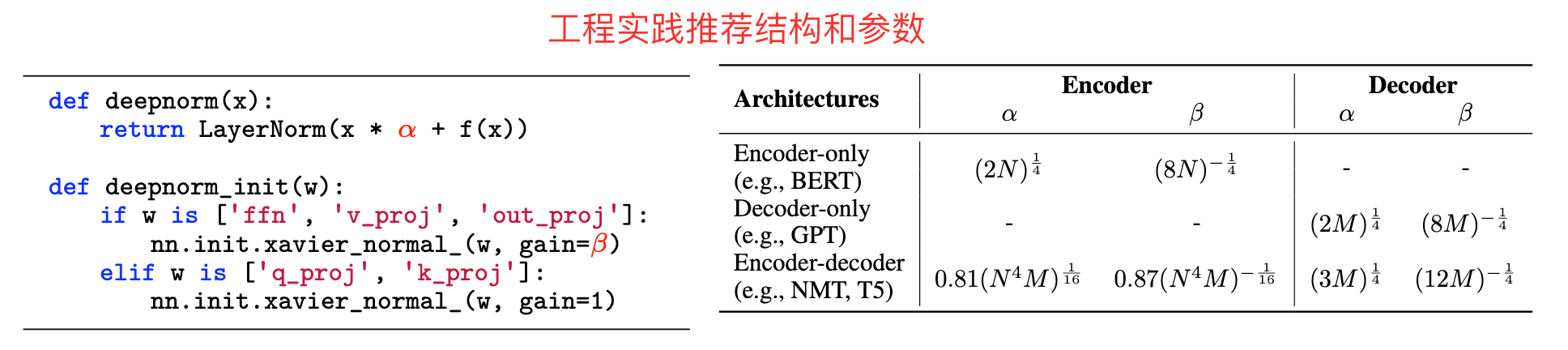
**思考:**DeepNorm中的是哪里的参数?
Note:整体回顾一下算子部分,引入后面的算子,不然大脑还停留在norm部分
4. Polling(CV)
- 作用
增大感受野
减少特征图尺寸,保留重要信息,降低计算量
降采样,减少噪音
位置变化鲁棒性增强
- 其他
对应有个out position矩阵
- 类型
Max、Avg等
5. activations(看01部分)
这里面内容较多,直接看01章节
[01. 激活函数🌟🌟🌟](#01. 激活函数🌟🌟🌟)
6. 其他
7. 特别的一些Operator🌟
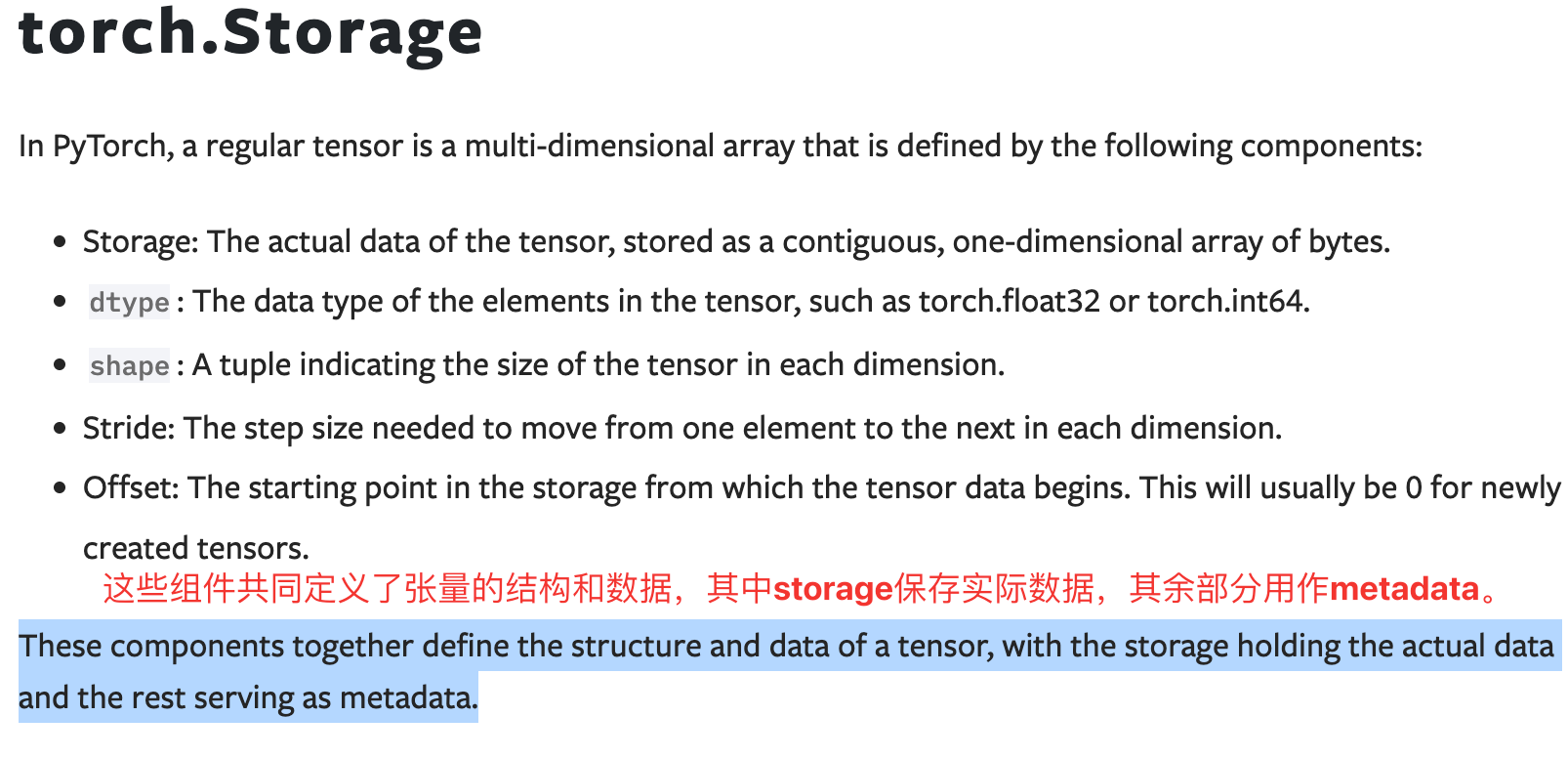
reshape、view、permute、transpose可能需要补充一下PyTorch的Tensor知识
比如:matedata和storage;data、storage、data_ptr、stride、contiguous;state、state_dict等
reshape
返回具有与输入相同数据和元素数量的张量,但具有指定的形状。
原始数据内存排布不变,只变shape
view
The returned tensor shares the same data and must have the same number
类似reshape,原始数据不变
要求张量是连续的**(contiguous),否则会报错(可先调用
.contiguous()解决)。**permute
返回原始张量输入的视图,其维度进行了排列。
permute会对数据底层重排,支持多个轴进行交换
transpose
返回一个张量,它是输入的转置版本。
类似permute,会对数据重排,支持两轴交换
Tips:
view():当tensor连续时tensor.view()不改变存储区的真实数据,只改变元数据(Metadata)中的信息, 调用view方法张量必须连续的。
reshape():当tensor连续时和view()相同,不连续时等价于contiguous().view()
permute():通过改变张量的步长(stride)重新排列张量的维度,但会导致张量在内存中的存储变得不连续
contiguous():开辟新的存储区,确保张量在内存中是连续存储,在permute()操作后需要接contiguous()才能接view()
stride():在指定维度(dim)上,存储区中的数据元素,从一个元素跳到下一个元素所必须的步长
pytorch的存储方式:metadata+storage
metadata保存:size,dimension,stride等元信息
storage保存:以一维数组保存对应的张量数据
| 操作 | 用途 | 是否共享内存 | 连续性要求 | 灵活性 |
|---|---|---|---|---|
view | 改变形状 | 是 | 必须连续 | 需元素数量一致 |
reshape | 改变形状(自动处理连续性) | 可能否 | 无 | 同 view |
transpose | 交换两个维度 | 是 | 可能破坏连续性 | 仅交换两个维度 |
permute | 重新排列所有维度 | 是 | 可能破坏连续性 | 可任意调整顺序 |
是对维度的压缩和扩充
增加一个维度,减少一个维度
concat
与split相反操作,可以指定某轴
stack
支持新增一个轴进行拼接
expand
支持广播机制
flatten
拉平成一维
……
split、slice reduce类型8. Embedding(可能需要单独一节)
结合Tokenizer
对分词器分到的结果进行Embedding
有一个Embedding表,直接根据index查到
计算原理:传入weight大小,把Embedding table里面的提取
9. Dropout🌟🌟🌟
功能
原理
丢弃 => 置零
随机性,不然会神经元坏死
训练和推理有啥不同
推理直接去掉,把连接weight乘以(1-p)
10 . 我的思考:
不同的Norm的参数量
可学习参数和均值方差
不同Norm操作维度,Conv操作维度,Polling操作维度
方法 可训练参数量 关键区别 Batch Norm 2C2C 对通道归一化,依赖 Batch 统计 Layer Norm 2D2D 对样本归一化,含 γ,βγ,β RMS Norm DD 仅保留 γγ,无 ββ 其他哪些算子的底层是copy还是in-place
如何实现训练和推理不同的情况?(相当于加锁或者if else)
03. BP神经网络&BaseLine
1. 什么是深度学习
- 应用场景(多看看招聘网站和公司官网)
- 回顾机器学习(构造特征属性到目标标签的映射关系)
- 由人的经验去判断的,大部分都可以用模型实现
2. BP神经网络
3. BaseLine
思考:
- 矩阵实现?矩阵乘法求梯度?
04. Loss Function
入手损失函数之前,我们需要回温一下整个模型训练流程,大方向要有(或者说为啥要损失函数、作用是啥)
补充一下数学相关内容(在大方向上讲,然后入细节)
1. 类型
- 绝对误差
- 平方误差
- 结合MAE和MSE
- 交叉熵
负对数似然(不同分布)
逻辑回归(或者softmax回归)的损失函数
KL散度
等等等
2. 正则化
数学基础:拉格朗日函数、KK T条件等
L1
lasso 回归
L2
ridge 回归
3. 应用场景
回归任务:
| 损失函数 | 公式 | 应用场景 |
|---|---|---|
| 均方误差 (MSE) | \frac{1}{n}∑(y_i−\hat y_i)^2 | 默认选择,对异常值敏感(因为平方放大误差),要求数据高斯分布。 |
| 平均绝对误差 (MAE) | \frac{1}{n}∑∥y_i− \hat y_i∥ | 稀疏异常值场景。 |
| Huber Loss | 分段 | 平衡MSE和MAE,对异常值鲁棒且光滑,需手动设定阈值δ。 |
分类任务:
| 损失函数 | 公式/特点 | 应用场景 |
|---|---|---|
| 交叉熵损失 (Cross-Entropy) | (二分类/多分类) | 分类任务默认选择,对错误预测惩罚高(梯度随误差增大)。 |
| 二元交叉熵 (BCE) | 二分类任务(如垃圾邮件检测)。 | |
| Focal Loss | 类别不平衡场景(如目标检测),通过γ降低易分类样本的权重。 | |
| Hinge Loss | 支持向量机(SVM),最大化分类间隔。 | |
| KL散度 | $ y_{\text{true}} \cdot \log \frac{y_{\text{true}}}{y_{\text{pred}}} = y_{\text{true}} \cdot (\log y_{\text{true}} - \log y_{\text{pred}})$ | 概率分布匹配(如生成模型、迁移学习)。 |
05. Tokenization
所处的位置(哪一步需要分词)
Tokenizer
1. 类型
- 词粒度
- 字粒度
- Subword粒度
- Unigram Language Model
- WordPiece
- 字节对编码(BPE)
- BBPE(DeepSeek等)
2.问题
- BPE如何保证推理时不出现OOV呢?
06. Optim
所处位置,作用。